Выполняю инженерные расчёты связанные с механической стороной робототехники:
Прочность (оптимизация веса и формы, усиление слабых мест)
Кинематика и динамика (определение скоростей движения механизмов, назначение мощностей приводов)
Экзоскелет Exochair 2018
Exochair (сейчас также известен под именем Keeepy) — пассивный экзоскелет нижней части тела. Предназначен для разгрузки спины при работе в неудобных положениях.
Новая версия экзоскелета существенно отличается от предыдущей. Конструкция состоит на 90% из алюминия (тогда как в предыдущей версии использовался конструкционный пластик).
Итоги проекта
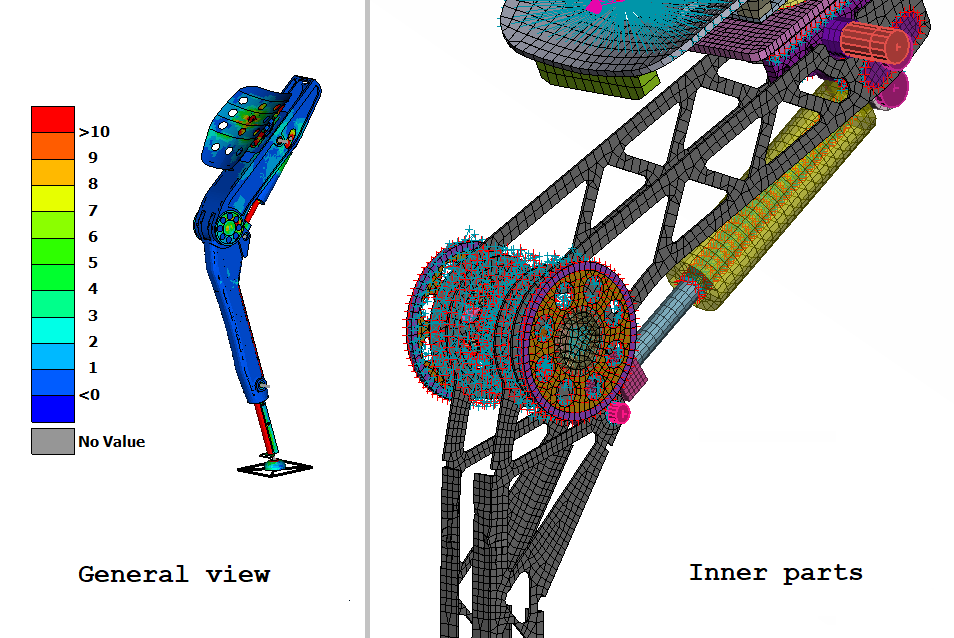
Был выполнен проверочный расчёт на прочность, были выданы рекомендации по усилению слабых мест конструкции.
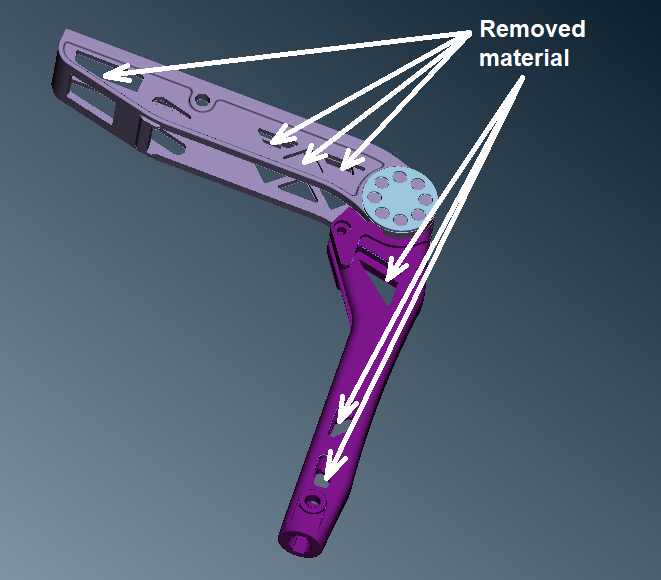
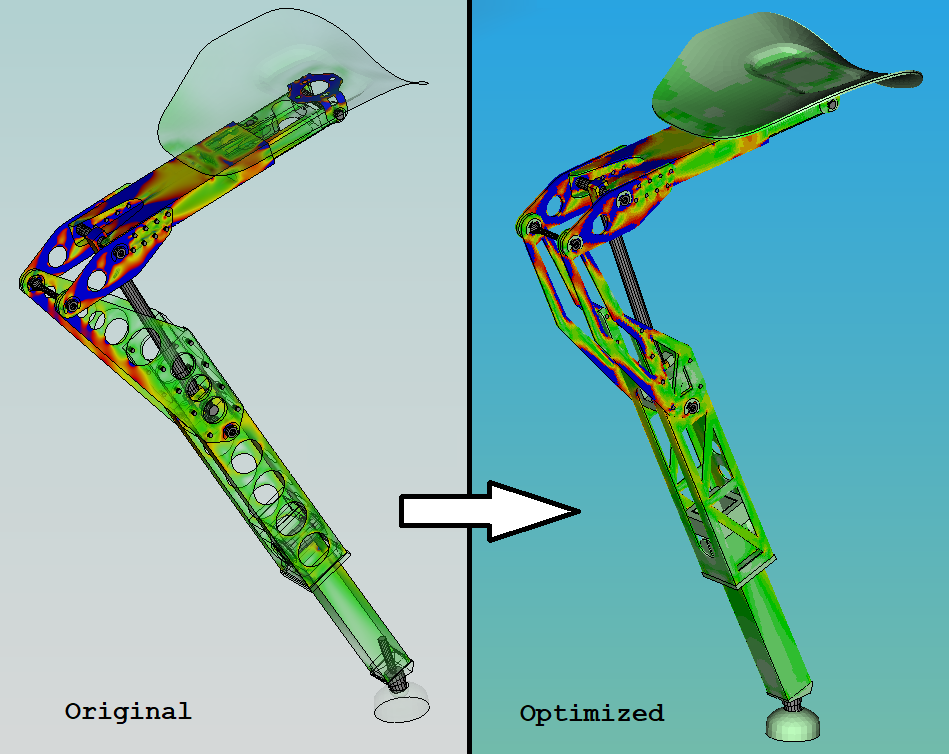
По части оптимизации было предложено изменение геометрии деталей конструкции, снижающее общий вес экзоскелета на 10%.
С 2020 г. экзоскелет находится в стадии серийного производства.
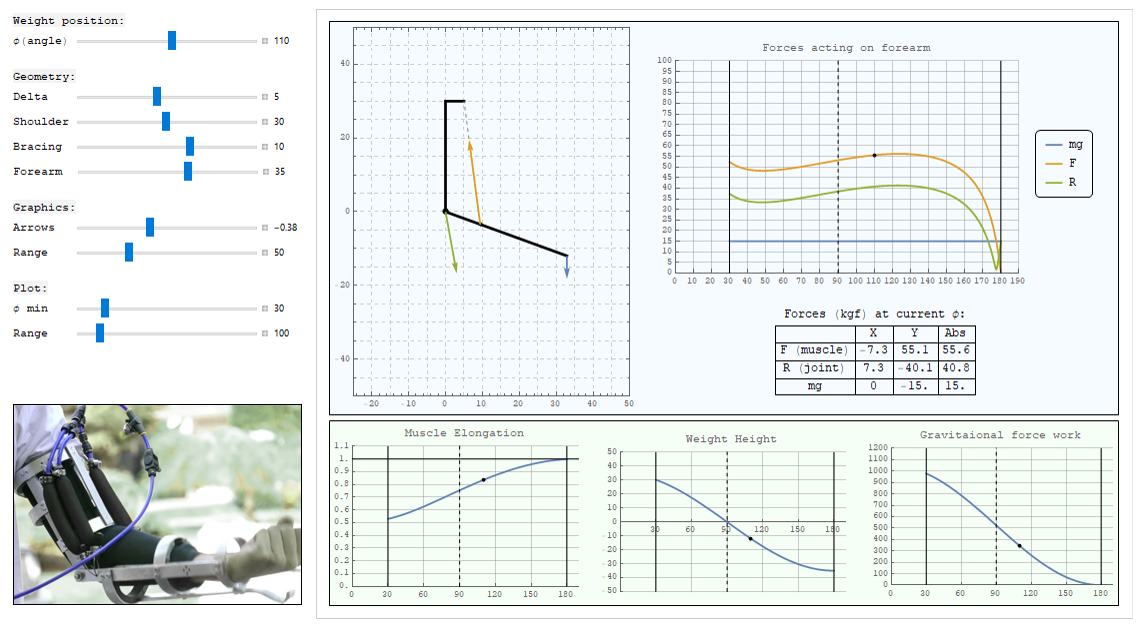
Задача: зная силовые параметры одной пневматической мышцы — определить оптимальные точки крепления пучка мышц в локтевом суставе механической руки.
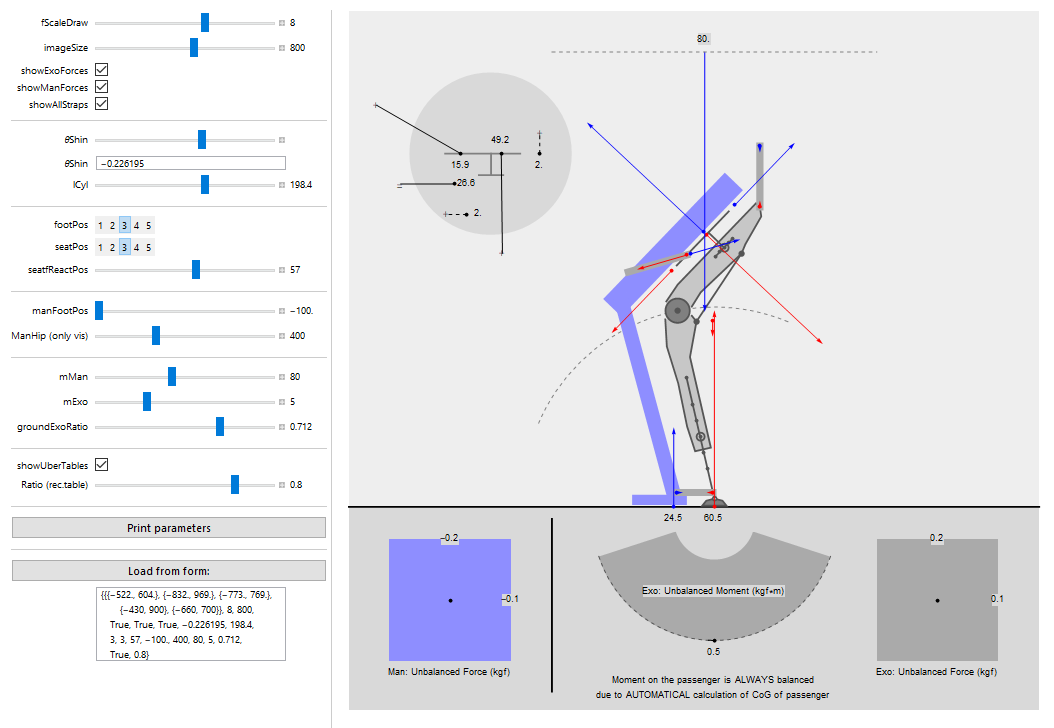
Для решения этой задачи была создана специальная математическая программа, позволяющая определить рабочий диапазон нагрузок как в самой мышце, так и в локтевом суставе (для упрощения расчёта весь пучок сведён в две точки крепления). Варьированием параметров модели подбираются точки крепления наиболее полно соответствующие силовым характеристикам имеющейся пневматической мышцы.